【 大 中 小 】
【打印】近日,全球计算机视觉三大顶级会议之一的欧洲计算机视觉国际会议(European Conference on Computer Vision, ECCV)在以色列特拉维夫举办。浙江大学控制科学与工程学院张宇老师课题组与德国人工智能研究中心(DFKI)、德国慕尼黑工业大学(TUM)合作参加ECCV2022位姿估计挑战赛(BOP Challenge 2022),荣获最佳分割算法(Overall Best Segmentation Method)与最佳只基于仿真图片训练的分割算法(The Best BlenderProc-Trained Segmentation Method)两项冠军。


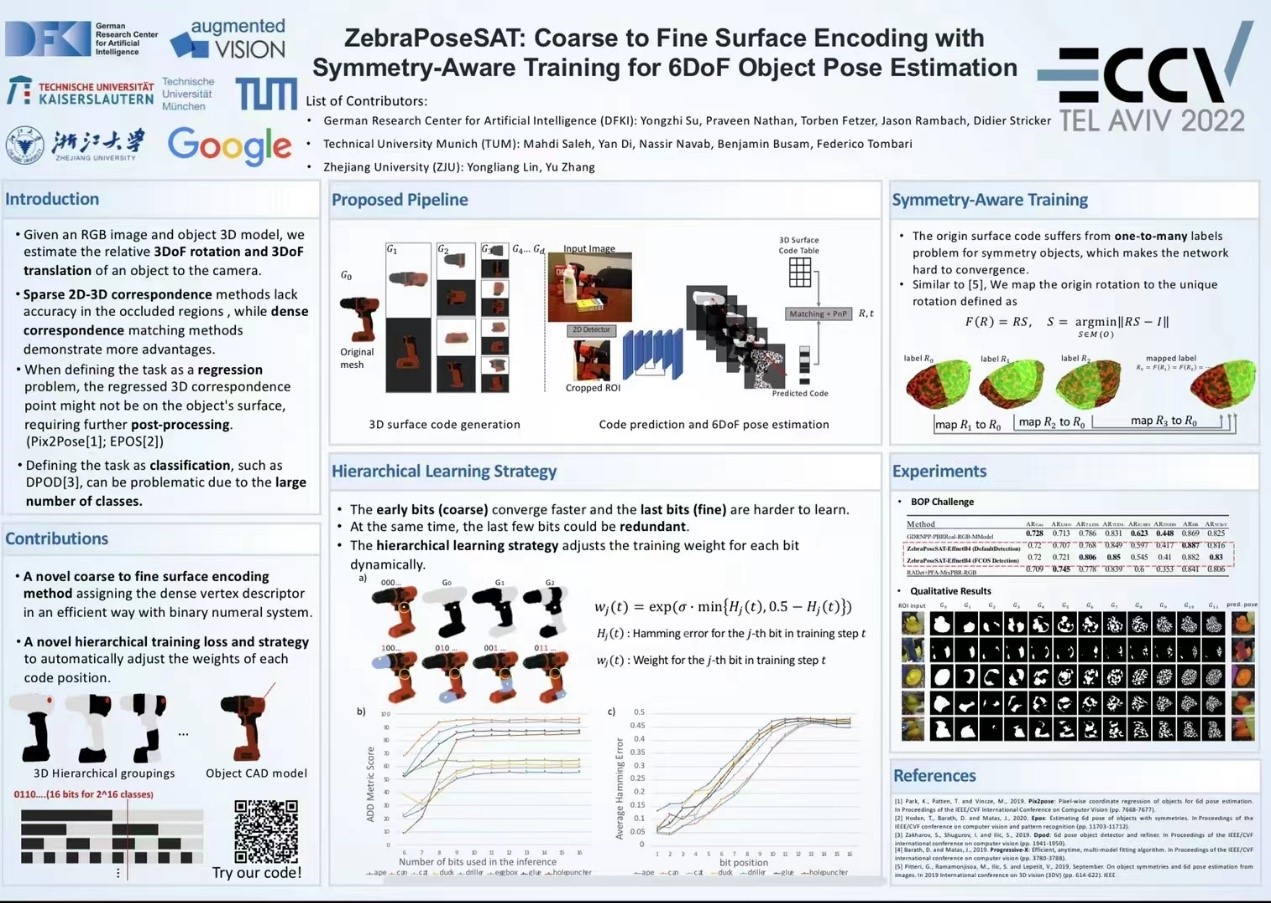
BOP 位姿估计挑战赛旨在解决六自由度目标位姿估计问题。目标位姿估计任务是机器视觉领域最具挑战的任务之一,在机器人精准抓取与增强现实等应用领域具有重要意义。
位姿估计问题的一个难点在于处理对称性。参赛方案基于德国人工智能研究中心发表在CVPR上的Zebrapose方法进行设计,原始方案在大部分测试中得分都不错,但在具有对称性的物体位姿估计方面指标较差,甚至没法收敛。我院张宇老师课题组(参与者:博士生林永良)专门设计了针对对称性物体位姿估计的训练模块SAT,并融入到具体方案中,提升了在对称物体上的性能指标。该模块目前已加入到相应的开源代码中。
本年度BOP 位姿估计挑战赛由ECCV的6D位姿估计研讨会(Recovering 6D Object Pose Workshop)承办,由Meta 元宇宙部门Reality Labs 与独立游戏公司Niantic Labs提供资金赞助。